
Spatially Aware Multi-Modal Directional Radiation Detector Swarms
Project #: 22-134 | Year 1 of 3
James Essex,a Bryan Lubay,a Gary Huffines,b Martin Arguelles-Perezc
aNevada National Security Site–Remote Sensing Laboratory; bNevada National Security Site–North Las Vegas; cUniversity of Nevada, Las Vegas
Executive Summary
This project is exploring spatially aware platforms that combine inputs from multiple sensors to estimate detector measurement locations. Spatial awareness along with enabling protocols for radiation data exchange between sensors will allow for the application of more robust methods for source detection and localization.
Description
All existing radiation detection systems utilize alarming algorithms that are temporal, and the localization of a potential threat currently requires manual methods and operator skill. If alerted using existing systems, the operator can rotate using body shielding to affect count rate or use a finder mode with tones that increase as the count rate increases. In access‐restricted environments, it is not currently possible to locate a source without long dwells using sophisticated and expensive instrumentation. These methods are slow and error‐prone, require post‐processing, or, in some tactical situations, are not practical or safe.
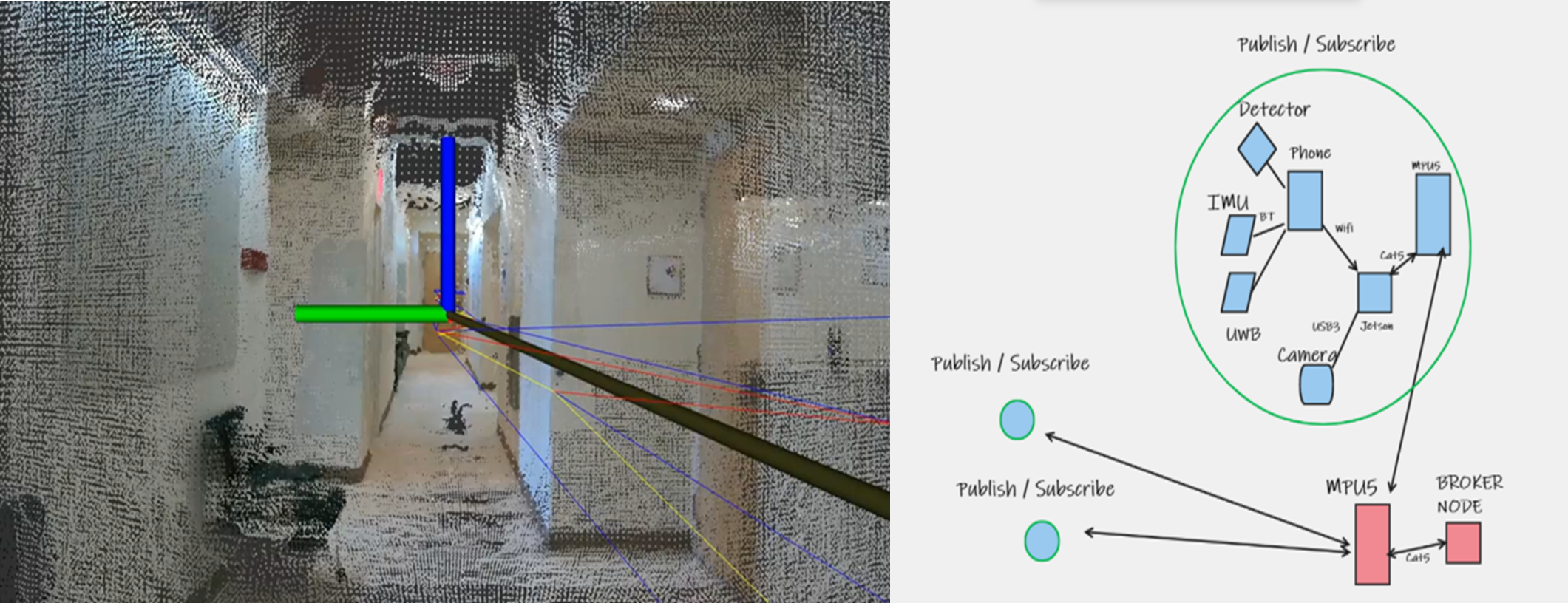
In the first year of this effort, we tested spatial sensing capabilities and developed the software layer to map relative positions of devices into a common local coordinate system. Our approach to this effort will be to utilize similar methods to those used with the HoloLens (Essex et al. 2018), but we will adapt the spatial sensing to the new Inertial Measurement Unit, RGB-Depth camera-based Simultaneous Localization and Mapping, and Ultra-Wide Band modules with new modular gamma and neutron detectors.
In the second year of this effort, we will continue to optimize pedestrian-based spatial awareness technologies and sensor fusion algorithms, and tune localization solutions using both gamma and neutron directional detection systems. Several data collection campaigns will be executed in a variety of environments that represent the spectrum of operational conditions of interest. These tests will characterize the performance of the spatial awareness suite to enable error estimates associated with localization.
Conclusion
This effort is novel because all previous radiation anomaly detection efforts have focused solely on detector response and have not been capable of exploiting precise spatial coordinates of each measurement or angular indications from a multi‐detector system. In addition to increasing the sensitivity of anomaly detection, we will develop algorithms for determining optimal data for incorporation into existing localization algorithms.
Mission Benefit
The development of this technology represents: 1) a practical solution to mapping radiation measurements in GPS-denied environments, and 2) the potential to equip current overt radiological search teams with a capability to localize a radiation source. This could enable the discovery of potential threat sources in rooms or buildings without access, such as apartment complexes, office spaces, or high‐rises, and reduce the time to find potential threats in large venues such as warehouses, parking garages, or maritime container ships.
Publications, Technology Abstracts, Presentations/Posters
September 9, 2022 poster session for the MSIPP NSSTC Consortium at UNLV, Las Vegas, NV.
References
Essex, J., C. Okada, A. Podovich, M. Reed, A. Guild-Bingham, D. Haber. 2018. “Adaptive Source Localization Using Augmented Reality.” In FY 2018 Site-Directed Research and Development Annual Report, 85–90. Las Vegas, Nevada: Mission Support and Test Services, LLC.
This work was done by Mission Support and Test Services, LLC, under Contract No. DE-NA0003624 with the U.S. Department of Energy. DOE/NV/03624–1630.
Return to Enabling Technologies for Autonomous Systems and Sensing
Go to SDRD Annual Report Index
Return to SDRD Homepage